La plupart de nos usines de moteurs électriques produisent de petits moteurs en utilisant le processus de montage par presse externe.
Le noyau du stator dans la ligne intégrée après trempage et cuisson, enfoncé dans le siège doit garantir que la position axiale est conforme aux exigences des dessins.
Sinon, une extrémité de la bobine sera trop étirée, ce qui entraînera des difficultés totales d'assemblage et entraînera une augmentation du potentiel magnétique de l'entrefer du moteur électrique, affectant ainsi les performances du moteur électrique.
Cela augmentera également l’usure de la force axiale exercée sur le rotor des moteurs électriques.
La position axiale du noyau de stator dans le boîtier est généralement assurée dans l'outil de pressage des pneumatiques.
La taille du capuchon à pression est contrôlée de manière à ce que la position du noyau après ajustement à la presse soit conforme aux exigences du dessin.
Pour garantir que le noyau du stator ne tourne pas dans le boîtier, le contact entre le cercle intérieur du boîtier et le cercle extérieur du noyau du stator n'est pas suffisant, c'est pourquoi chaque moteur électrique est également équipé d'une vis de butée pour fixer complètement le noyau dans le boîtier.
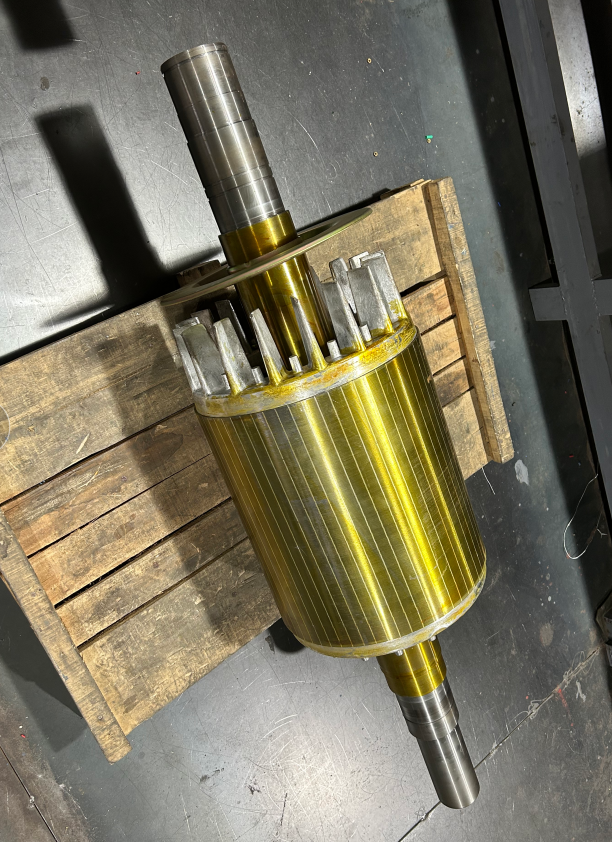
Assemblage du rotor
L'assemblage du rotor d'un moteur asynchrone comprend l'assemblage du noyau et de l'arbre du rotor, l'assemblage des roulements et l'assemblage du ventilateur.
C'est l'élément clé de la production de moteurs électriques.
Assemblage du noyau et de l'arbre du rotor
Lorsque le moteur électrique fonctionne, la puissance mécanique est produite via l'arbre du rotor. Par conséquent, la fiabilité de la combinaison du noyau et de l'arbre du rotor est très importante.
Lorsque le diamètre extérieur du rotor est inférieur à 300 mm, le noyau du rotor est normalement pressé directement sur l'arbre du rotor ; lorsque le diamètre extérieur du rotor est supérieur à 300 mm à 400 mm.
Le support du rotor est d'abord enfoncé dans le noyau, puis l'arbre du rotor est enfoncé dans le support du rotor.
Les moteurs électriques de la série Y adoptent une structure dans laquelle le noyau du rotor est pressé directement sur l'arbre du rotor de la plupart des fabricants.
Il existe trois formes de base d'assemblage entre le noyau du rotor et l'arbre sur la ligne de production : l'ajustement moleté par pression à froid, l'ajustement par manchon chaud et l'ajustement par clavette.
Ajustement moleté par presse à froid Dans l'ajustement moleté par presse à froid, le processus de traitement de l'arbre est le suivant : finition de la lime à noyau, moletage, meulage, puis enfoncement dans le noyau du rotor, puis finition de l'extension de l'arbre de meulage, lime à roulement et finition du cercle extérieur du noyau. .
Lors de l'utilisation du processus de moletage, une interférence excessive n'est pas non plus autorisée.
Étant donné que la taille de la pression de pressage à froid est proportionnelle à la quantité d'interférence, lorsque la quantité d'interférence est trop importante, elle peut ne pas être enfoncée ou le matériau peut être déformé ou endommagé en raison d'une contrainte interne excessive.
Le manchonnage à chaud est généralement réalisé en utilisant la chaleur résiduelle du rotor en fonte d'aluminium (ou en réchauffant le rotor).
Le processus de manchon chaud économise l'équipement de pressage à froid, tandis que la combinaison du noyau du rotor et de l'arbre est plus fiable.
Étant donné que le manchon chaud est chauffé pour dilater l'inclusion, puis refroidi, le trou de l'inclusion se rétrécit pour maintenir l'inclusion, ce qui garantit des valeurs d'interférence suffisantes et une fiabilité élevée.
L'avantage de la connexion à clé est qu'elle assure la fiabilité de la connexion et facilite l'organisation du flux de production.
L'inconvénient est que le processus de traitement augmente et que la rainure de clavette dans l'arbre réduit la résistance de l'arbre, en particulier dans les petits moteurs électriques.
Lors de l'utilisation d'une connexion à clé, la largeur de la clé est sélectionnée en fonction des exigences spécifiées.
Afin de simplifier le processus, il est généralement possible d'utiliser la même largeur de rainure de clavette avec le prolongement d'arbre pour les machines électriques.
Ensemble de roulement
Dans les moteurs asynchrones de petite et moyenne taille, la construction à roulements est largement utilisée. Ils sont plus légers que les paliers lisses, nécessitent un entretien moins fréquent pendant le fonctionnement et consomment moins d'huile lubrifiante et de graisse.
Dans le même temps, les roulements ont un faible jeu radial et conviennent mieux aux moteurs asynchrones avec un petit entrefer.
Assemblée générale
L'assemblage total des moteurs de petite et moyenne taille comprend le rotor intégré au stator, l'installation d'autres composants, tels que les embouts, les boîtes de jonction, les ventilateurs externes et les dispositifs à balais, etc. chez de nombreux fabricants.
Après le montage total, il est également nécessaire d'effectuer des tests et la finition extérieure du moteur.
Assemblage général du rotor en stator pour la production de moteurs électriques
L'emmanchement du rotor dans le stator est l'un des processus clés.
Un fonctionnement incorrect peut facilement provoquer des meurtrissures des enroulements et parfois même une déformation de l'arbre du rotor.
Lors de l'insertion du rotor, il faut faire attention à la position correspondante de l'extension d'arbre et de la boîte de jonction.
Si la masse du rotor est inférieure à 35 kg, il peut être inséré manuellement dans le stator.
Pour les rotors plus grands, des outils de levage sont nécessaires.
En fonctionnement, soulevez d'abord l'outil au niveau de l'anneau de levage 2 et placez-le sur l'arbre du rotor, puis soulevez le rotor au niveau de l'anneau de levage 1 et maintenez le levier 3 pour faire pénétrer le rotor dans le stator horizontalement et en douceur.
Installation du couvercle d'extrémité
Lors de l'installation du capuchon d'extrémité, installez généralement en premier l'extrémité d'extension sans essieu.
Appliquez une fine couche d'huile sur la surface de butée de l'assemblage pour éviter que la pièce buccale ne rouille.
Après avoir installé le capuchon d'extrémité, tapotez autour du capuchon d'extrémité pour serrer la face d'extrémité du capuchon d'extrémité et le siège, puis serrez tour à tour les boulons en diagonale.
Lorsque le deuxième couvercle d'extrémité est installé, le rotor doit être soulevé à plat (le petit moteur ne peut pas être soulevé), puis la butée du couvercle d'extrémité est assemblée, serrez le boulon.
Si les deux embouts sont installés avec des axes différents, ou si les surfaces d'extrémité ne sont pas parallèles, le rotor peut tourner de manière stagnante, vous devez utiliser un marteau pour frapper autour des embouts afin d'éliminer les différents axes, phénomène non parallèle, de sorte que le le rotor tourne de manière flexible.
Installez ensuite le couvercle de roulement extérieur, serrez les vis du couvercle de roulement.
Réglage de l'entrefer
Pour l'ensemble du roulement à roulement du couvercle d'extrémité ronde du moteur de taille moyenne, lorsque le rotor est inséré dans le stator, le couvercle d'extrémité de l'extrémité du roulement à billes doit être installé en premier, puis le couvercle d'extrémité de l'extrémité du roulement à rouleaux doit être installé pour éviter que le roulement ne soit endommagé.
Lorsque le couvercle d'extrémité de l'extrémité du roulement à billes doit être installé en premier, la vis du couvercle d'extrémité ne doit pas être serrée, une fois le couvercle d'extrémité de l'extrémité à bille installé, serrez ensuite la vis.
Une fois le couvercle d'extrémité installé, pour ajuster l'entrefer.
La méthode de réglage consiste à utiliser le vérin (quatre aux deux extrémités) pour régler la position relative du couvercle d'extrémité.
Utilisez la règle de prise dans la position de différence mutuelle 120. pour la mesure (les deux extrémités), jusqu'à ce que l'uniformité de l'entrefer soit conforme aux conditions techniques de la norme.
Après avoir ajusté l'entrefer, il y aura une fixation par vis, dans la poinçonneuse horizontale en fonction de l'emplacement du trou de broche de positionnement de boulette de forage de dessin, et jouer à la broche de positionnement de personnes.
Assemblage de système de balais en électronique de puissance
Dans le moteur électrique avec contact à bague collectrice (tel que le moteur asynchrone à rotor à enroulement de grande et moyenne taille).
La qualité de l'assemblage des balais a un grand impact sur la situation de la conduction ; dans le moteur avec collecteur, la commutation de la situation est bonne ou mauvaise, souvent étroitement liée à la qualité de l'assemblage du système de balais.
Les balais pour anneau collecteur et collecteur sont généralement des balais en graphite électrochimique et des balais en graphite métallique.
La brosse en graphite électrochimique est fabriquée à partir de graphite naturel après traitement pour éliminer les impuretés, puis frittée.
Selon les différents ratios de matières premières, il peut être divisé en base de graphite, à base de coke et à base de noir de carbone.
Les balais à base de noir de carbone ont un coefficient de résistance et une chute de tension de contact plus élevés et conviennent aux moteurs à commutation difficile ; les balais à base de graphite sont couramment utilisés dans les moteurs normaux.
Les brosses en graphite électrolytique ont moins de dureté et une usure plus lente, la densité de courant est généralement disponible à 10-12A1cm2. Les brosses en graphite métallique conviennent aux moteurs basse tension et à courant élevé, elles sont frittées en ajoutant 40 % à 50 % de poudre de cuivre dans le graphite.
Il a une densité élevée, une faible dureté, un faible coefficient d'usure, un faible coefficient de résistance, une faible chute de pression de contact, une usure lente et la densité de courant est généralement disponible à 17-20A/cm2 pour une qualité supérieure.
La disposition des balais dans le moteur à courant continu, car dans les balais positifs et négatifs sous le collecteur, le degré d'usure est incohérent, il doit donc y avoir une disposition raisonnable de la position de la disposition des balais.
Les balais doivent être décalés sur la surface du collecteur.
Automatisation de petits ensembles moteurs pour groupes motopropulseurs électriques
Afin d'améliorer la productivité du travail, de réduire les coûts de production, de raccourcir le cycle de développement ou de production des produits, afin d'améliorer la compétitivité des produits sur le marché. L'industrie automobile nationale et étrangère est en concurrence pour introduire la technologie d'automatisation dans le domaine de l'assemblage de moteurs.
Le premier système d’automatisation de l’assemblage de moteurs, représenté par la chaîne d’assemblage semi-automatique de moteurs, était utilisé pour l’assemblage de petits moteurs avec de grandes quantités et peu de spécifications.
Cette ligne d'assemblage semi-automatique comprend des machines d'assemblage automatiques telles qu'une machine de chargement de rotor, une machine de montage à pression de roulements, une machine de montage à presse de capuchon d'extrémité et une machine de serrage de vis, dont les fonctions sont : chargement du stator, insertion du rotor dans le stator, montage à pression de roulement, capuchon d'extrémité. chargement et serrage papillon et clou.
Le processus d'assemblage principal est effectué par des machines et le travail auxiliaire est effectué à la main.
L'équipement de cette chaîne d'assemblage semi-automatique est fixe et a un certain rythme de travail, et l'efficacité de travail est élevée, pouvant atteindre 25 à 40 s/ensemble.
Afin de répondre aux exigences de l'assemblage automatique de produits multi-espèces et en petits lots, les pays étrangers ont développé des cellules d'assemblage flexibles (FAC) et des systèmes d'assemblage flexibles (FAS), qui utilisent tous deux des robots contrôlés par ordinateur comme équipement de base et ont donc un haut niveau d’automatisation.
La cellule d'assemblage flexible comprend un robot de manipulation et de multiples robots d'assemblage.
Le robot de manutention est chargé de manipuler différentes pièces et de livrer dans l'ordre les pièces assemblées au poste de travail du robot d'assemblage, puis de transporter les pièces assemblées jusqu'au tapis roulant pour les évacuer.
Des équipements tels que des établis et des presses sont équipés de robots d'assemblage, qui sont responsables de l'assemblage de diverses pièces.
La cellule d'assemblage flexible peut assembler différents types de composants, et le programme informatique peut également être modifié afin d'assembler des produits moteurs avec des spécifications différentes.
Sur la base de la cellule d'assemblage flexible, un système d'assemblage flexible entièrement automatisé a été développé.
Ce système comprend principalement plusieurs parties principales telles qu'une unité d'assemblage programmable, un entrepôt de stockage système et un système de transfert logistique flexible, dont le cœur est l'unité d'assemblage programmable.
L'unité d'assemblage programmable réalise le contrôle du robot d'assemblage en modifiant le programme informatique et assemble divers moteurs avec des spécifications différentes.
Afin de garantir un approvisionnement sans entrave en composants du système de montage et de servir de tampon en cas de panne du système, le système de montage flexible dispose d'un entrepôt de stockage.
L'entrepôt est équipé de commandes d'étagères programmables qui permettent à l'ordinateur de fournir un accès aléatoire à chaque unité de stockage.
Le système de transfert logistique flexible se compose d'un tapis roulant ou d'un véhicule à guidage automatique (AGV), qui est responsable de la manutention des matériaux et de l'échange de logistique entre les processus à l'intérieur et à l'extérieur du système.
Les systèmes FAS utilisent généralement un système de contrôle informatique distribué hiérarchique pour gérer et contrôler divers équipements automatisés du système.
Le système informatique comprend un ordinateur principal, un ordinateur de gestion FAS, un ordinateur logistique et plusieurs ordinateurs FAC.
Grâce à ces ordinateurs, le système FAS peut facilement modifier le programme et contrôler le système d'assemblage pour réaliser l'assemblage automatique de moteurs multi-spécifications.
A titre d'exemple, un système d'assemblage automatique développé à l'étranger peut assembler automatiquement 450 types de petits moteurs avec des spécifications différentes.
Cela montre que le système d'assemblage flexible FAS est non seulement hautement automatisé, mais également hautement adaptable, et constitue aujourd'hui la direction de l'automatisation pour l'assemblage de petits moteurs.
En plus de l'automatisation de l'assemblage, il existe également des lignes de test automatiques de moteurs en usine et des lignes automatiques de peinture électrostatique.
L'utilisation de ces lignes automatiques améliorera considérablement les conditions de travail et augmentera la productivité du travail, et peut créer des conditions favorables à la réalisation de la production méta-personnalisée d'usines de moteurs électriques.
Bienvenue à laisser un message dans la zone de commentaires pour toute information sur les moteurs électriques.
Pour toute demande de renseignements sur le moteur électrique, veuillez contacter le meilleur fabricant de moteur électrique en Chine - moteur Dongchun comme suit ;
Dongchun motor propose une large gamme de moteurs électriques utilisés dans diverses industries telles que les transports, les infrastructures et la construction.
 Aller au contenu
Aller au contenu