Wat is die verskil tussen 'n borsellose motor en 'n borselmotor?
Wat is die verskil tussen 'n sinchrone motor en 'n asinchrone motor?
Wat van die wondrotor-induksiemotor?
Is alle servomotors WS-motors?
Is alle servomotors sinchroniese motors?
Behoort stapmotors aan GS-motors of WS-motors?
Is 'n servomotor 'n servomotor? ......
Die wyses het eenkeer gesê: As kennis nie sistematies is nie, wat is die verskil tussen dit en 'n paragraaf?
Maar die wyse boek oor daardie langdradige teks, daardie fantasievolle terminologie, daardie geloofwaardige verduideliking, kyk regtig na mense in die wolke.
Ek het ook lankal op die internet gesoek, nie 'n meer sistematiese verduideliking van die elektriese motorstruktuur en -beginsel van klassifikasie gevind nie, so hulle het baie moeite gedoen om navraag te doen en 'n kopie te organiseer.
Hierdie artikel probeer om die sistematiese kennis in gewone taal te verduidelik, en gebruik baie animasie en prente om die obskure kennis helder uit te druk.
Weens my beperkte kennis is dit onvermydelik dat daar baie foute is, maak asseblief die kundiges reg, moet asseblief nie huiwer om raad te gee nie.
1. 'n diagram om die basiese tipes elektriese motors te verduidelik
2. GS elektriese motor - borselmotor
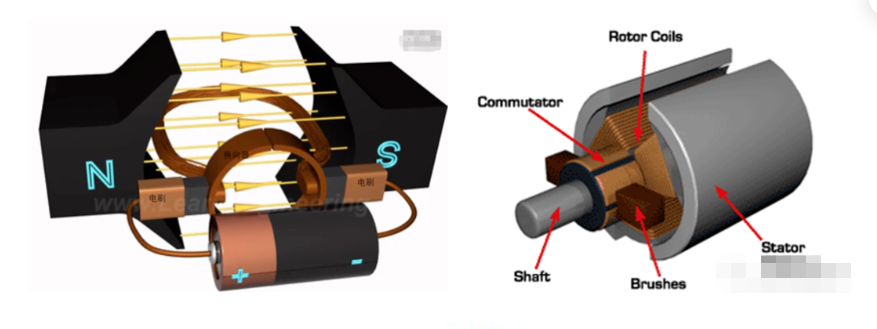
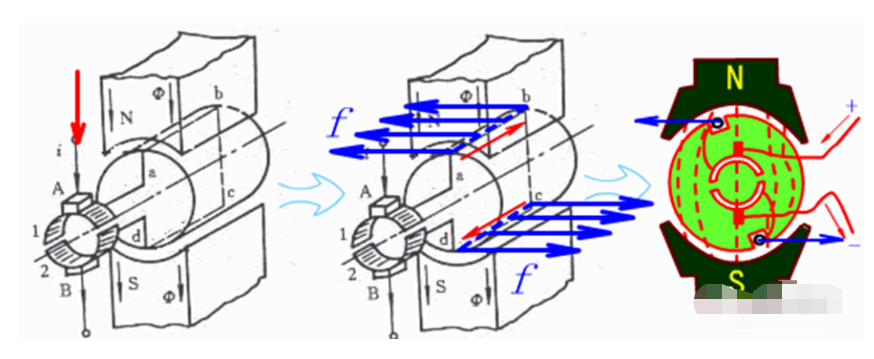
Lees die sekondêre skoolfisika van die boelie-skuim weet, om die bekragtigde geleier in die magnetiese veldkrag van daardie ding te bestudeer, het ons die linkerhand in 'n gebreekte palm opgelei, wat presies die beginsel van GS-induksiemotor is.
Alle elektriese motors bestaan uit stator en rotor, in DC elektriese motors, om die rotor te laat draai, moet jy voortdurend die rigting van die stroom verander, anders kan die rotor net 'n halwe draai draai, dit is soos 'n fietspedaal.
Dit is hoekom GS-motors kommutators nodig het.
Breedweg gesproke sluit geborselde GS-motors geborselde motors en borsellose motors in.
Borselmotor word ook DC-induksiemotor of koolstofborselmotor genoem, dikwels na verwys as borsel-DC-motor.
Dit maak gebruik van meganiese kommutasie, die eksterne paal beweeg nie die interne spoel (armatuur) wat beweeg nie, kommutator en rotorspoel wat saam draai, borsels en magnete beweeg nie, so die kommutator en kwas wrywing wrywing, voltooi die huidige rigtingwisseling.
Borselmotor nadele.
1, meganiese kommutasie van vonke wat deur die kommutator en borselwrywing gegenereer word, elektromagnetiese interferensie, hoë geraas, kort lewe.
2, swak betroubaarheid, baie mislukkings, wat gereelde onderhoud vereis.
3, as gevolg van die teenwoordigheid van kommutator, die beperking van die rotor traagheid, die beperking van die maksimum spoed, wat die dinamiese prestasie.
Aangesien dit so baie tekortkominge het waarom dit steeds algemeen gebruik word, want dit is 'n hoë wringkrag, eenvoudige struktuur maklike instandhouding (d.w.s. verander koolstofborsels), goedkoop.
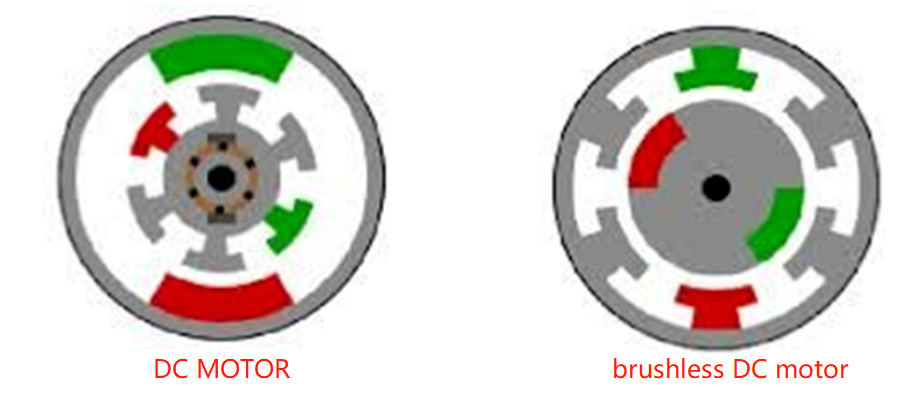
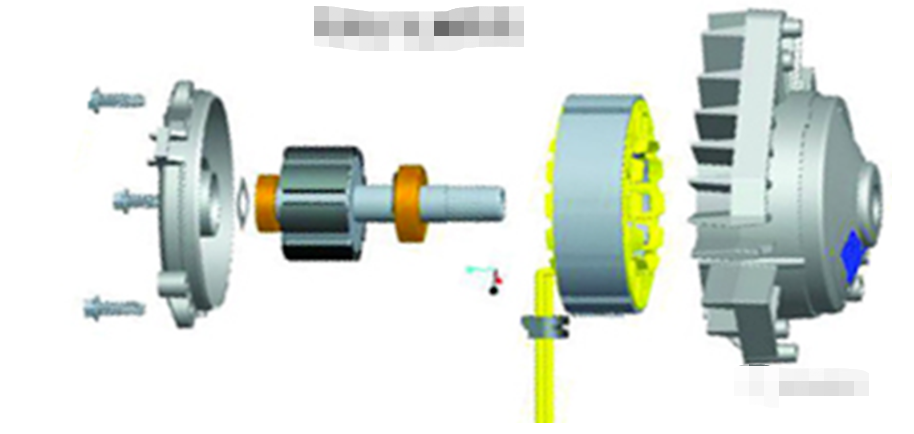
2. GS-motors - borsellose motors
Borsellose motor word ook in sommige velde DC-omskakelaarmotor (BLDC) genoem, dit gebruik elektroniese kommutasie (Hall-sensor), die spoel (armatuur) beweeg nie die magnetiese pole beweeg nie, dan kan die permanente magneet buite die spoel of binne die spoel wees, so daar is 'n eksterne rotor borsellose motor en interne rotor borsellose motor
Borsellose motors is op dieselfde manier gebou as permanente magneet sinchrone motors.
'n Enkele borsellose motor is egter nie 'n volledige kragstelsel nie. Borsellose moet basies beheer word deur 'n borsellose kontroleerder, ook bekend as 'n ESC, om deurlopende werking te verkry.
Dit is die borsellose elektroniese goewerneur (ESC) wat werklik sy werkverrigting bepaal.
Oor die algemeen is daar twee tipes dryfstrome vir borsellose motors, een is 'n vierkantgolf en die ander is 'n sinusgolf.
Soms word eersgenoemde 'n GS-borsellose motor genoem, en laasgenoemde word 'n WS-servomotor genoem, wat presies 'n soort WS-servomotor is.
Borsellose motors werk op verskillende maniere, en kan verdeel word in binne-rotor borsellose motors en buite-rotor borsellose motors.
Die binnerotor is driefase, wat duurder is.
Die buitenste rotor word gewoonlik in enkelfase gebruik, die prys van die mense, massaproduksie is naby die koolstofborselmotor, so in onlangse jare is dit wyd gebruik.
Die prys van die buitenste rotor drie-fase is naby aan die prys van die binneste rotor.
Wel, soos jy kan raai, is die nadeel van borselmotors die punt van borsellose motors.
Dit het hoë doeltreffendheid, lae energieverbruik, lae geraas, lang lewe, hoë betroubaarheid, servobeheer, traplose frekwensie-omskakelingspoed (tot 'n baie hoë spoed) en ander voordele.
Dit is relatief kleiner as die kwas DC motor, beheer as die asynchrone AC motor is eenvoudig, die begin wringkrag is groot oorlading kapasiteit, soos vir die nadele ...... is duurder as die kwas, slegte onderhoud.
2. GS-motor - spoedbeheerbeginsel
GS-induksiemotorspoedregulering: die sogenaamde spoedregulering, dit wil sê deur die motorspoed aan te pas om die vereiste wringkrag te verkry.
permanente magneet dc motor deur die aanpassing van die spanning, reeks weerstand, verander die opwekking kan spoed wees, maar die werklike spanning aanpassing is die mees gerieflike en mees algemeen gebruik word, die belangrikste gebruik van PWM spoed regulering.
PWM is eintlik deur die hoë-spoed skakelaar om DC spanning regulering te bereik, 'n siklus, oop 'n lang tyd, die gemiddelde spanning is hoog, af 'n lang tyd, die gemiddelde spanning is laag, baie gerieflik om aan te pas, solank die skakel spoed Solank as wat die skakel spoed is vinnig genoeg, die harmonieke van die rooster is minder, en die stroom is meer kontinu.
Die borsels en kommutator dra egter vir 'n lang tyd, en terselfdertyd is daar 'n groot stroomverandering tydens kommutasie, wat baie maklik is om vonke te produseer.
Die kommutator en borsels beperk die kapasiteit en spoed van GS-induksiemotor, wat maak dat die spoedregulering van GS-induksiemotor 'n bottelnek ontmoet.
Vir borsellose GS-induksiemotor beheer die spoedbeheer slegs die insetspanning op die oppervlak.
Maar die motor se selfbeheerfrekwensiebeheerstelsel (borsellose GS-motor self kom met 'n rotorposisiedetektor en ander rotorposisieseinverkrygingstoestel, wat die rotorposisiesein van hierdie toestel gebruik om die faseveranderingsmoment van die veranderlike spanningsfrekwensiebeheertoestel te beheer) beheer outomaties die frekwensie volgens die veranderlike spanning, wat amper dieselfde is as die GS (geborselde) motor, baie gerieflik. Baie gerieflik.
Omdat die rotor gebruik maak van permanente magnete, geen spesiale opwekking winding, in die geval van dieselfde kapasiteit, die motor is kleiner, ligter, meer doeltreffend, meer kompak, meer betroubare werking, beter dinamiese werkverrigting, in die aandrywing van elektriese voertuie en ander aspekte is wyd gebruik.
Wisselstroommotors word verdeel in sinchrone motors en asinchrone motors, sinchrone motors word meestal in kragopwekkers gebruik en asinchrone motors word meestal in elektriese motors gebruik. Hulle is 'n eekhoringhok-induksiemotor.
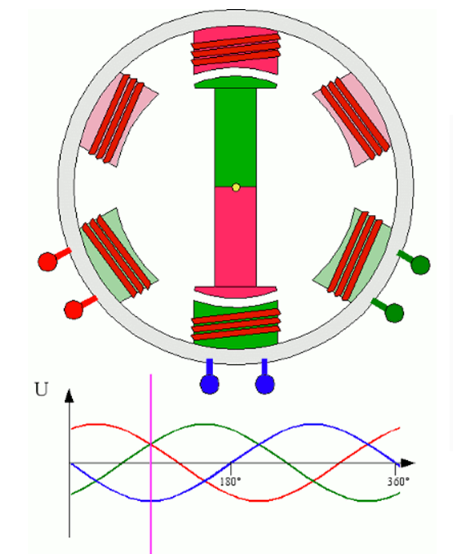
Die behuising van die motor is die stator, en daar is drie simmetriese AC-wikkelings op die stator.
Soos die volgorde van die drie fases verander, word 'n roterende sintetiese magnetiese veld gevorm, en die rotasiespoed van die magnetiese veld is die sinchrone spoed.
Die sinchrone spoed n=60f/p, f is die frekwensie, p is die aantal poolpare, byvoorbeeld, vir 'n 2-pool motor gekoppel aan die nasionale netwerk 50Hz (d.i. die aantal poolpare is 1 paar), dan is die spoed n=60*50/1=3000r/min.
Net so is die sinchrone spoed van 4-pool, 6-pool en 8-pool motors 1500, 1000 en 750.
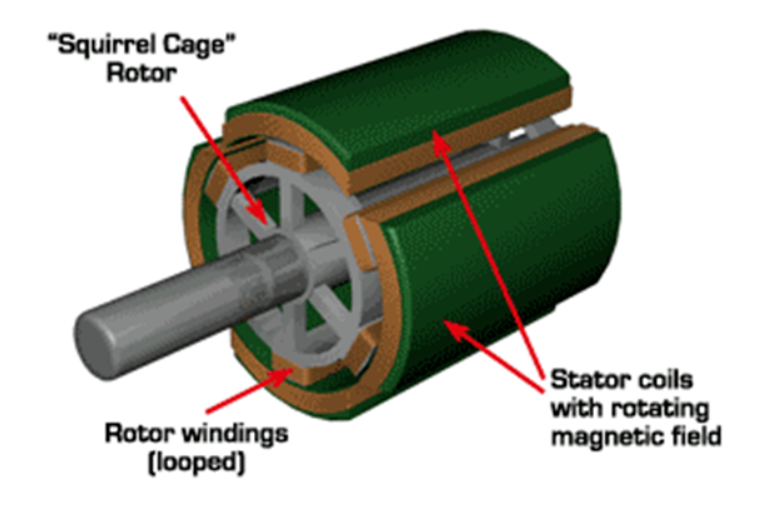
Asinchroniese motors het 'n eenvoudige meganisme met 'n geslote spoelrotor, soos 'n eekhoringhoktipe.
Die rotorspoel sal die roterende magnetiese veld sny om die geïnduseerde elektriese potensiaal op te wek, wat op sy beurt die geïnduseerde stroom genereer, en uiteindelik die roterende magnetiese veld.
Sodat die rotor 'n elektromagneet word en die rotasie van die statormagnetiese veld sal volg, dus moet die rotorspoed wees < die roterende magnetiese veld van die stator, om die magnetiese induksielyne te sny.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
Dit wil sê die asynchrone spoed van die rotor <sinchroniese spoed, daar is 'n spoedverskil tussen die rotor- en statormagnetiese veld, dus word dit 'n asinchrone motor genoem.
Die gegradeerde spoed van asinchrone motor wissel effens van vervaardiger tot vervaardiger, ongeveer 2800+r/min vir 2-pool motor, 1400+,950+,700+ vir 4-pool, 6-pool en 8-pool asinchronies.
Die spoed van asinchrone motor is hoog as daar geen las is nie, en neem af wanneer daar 'n las is.
Asinchroniese motor het 'n eenvoudige struktuur, maklike instandhouding, betroubare werking en goedkoop prys, so dit word wyd gebruik.
4. Driefase-wisselstroommotors - sinchrone motors
Sinchroniese motor.
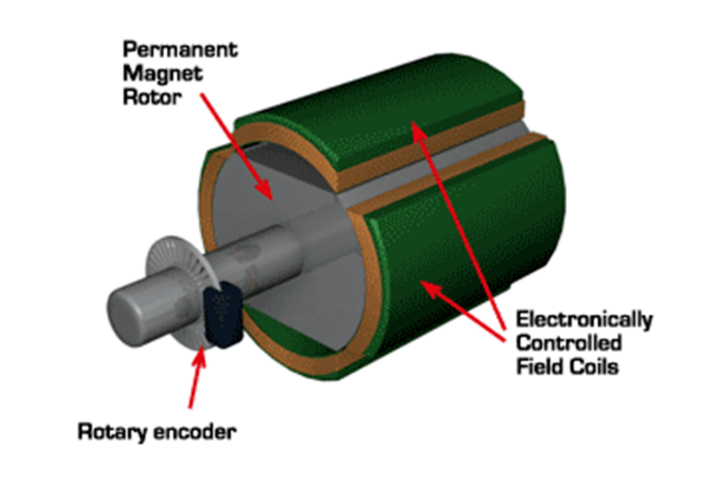
As jy die rotor spoed = stator magnetiese veld rotasie spoed, word dit 'n sinchrone motor, op hierdie tydstip is dit nodig om die stator te verander in 'n elektromagneet of permanente magneet, dit wil sê, om die stator te bekragtig, op hierdie tydstip nie meer nodig om die magnetiese induksie lyn te sny kan draai, die rotasie spoed en magnetiese veld rotasie spoed is dieselfde, dit wil sê, die vorming van sinchrone motor.
Sinchroniese motor rotor struktuur is meer kompleks as asinchroniese motors, hoë pryse, in produksie lewe is nie so wyd gebruik as asinchroniese motors, hoofsaaklik gebruik as kragopwekkers, nou termiese kragstasies, hidro-elektriese kragstasies, stoom turbines, hidrouliese turbines is basies sinchroniese motors.
5. Drie-fase AC motor - asynchrone elektriese motors spoed regulering
Asynchrone motor spoed regulering: teoreties, asynchrone motor beheer AC frekwensie, spanning, of rotor weerstand, motor paal verspreiding kan spoed regulering wees, maar in die praktyk oneindige spoed regulering te bereik met die metode van die aanpassing van die frekwensie en spanning te bereik.
As gevolg van die spanning regulasie spoed reeks is nie groot, oor die algemeen kan slegs gebruik word in spoed beheer vereistes is nie hoë geleenthede, die toepassing is nie wydverspreid.
Veranderlike frekwensie spoedregulering: Praat van frekwensie, ons het dalk daarvan gehoor.
Die volle naam van frekwensie-omskakeling is Variable Voltage Variable Frequency (VVVF), wat beteken dat die spanning verander word wanneer die frekwensie verander word, sodat die spoedreeks van asinchrone motor groot genoeg is.
Frekwensie-omsetters kan in twee breë kategorieë verdeel word: AC-AC frekwensie-omsetters en AC-DC frekwensie-omsetters.
AC-DC-omskakelaar: AC-krag word direk deur kragelektronika in AC-krag van 'n ander frekwensie omgeskakel.
Die maksimum uitsetfrekwensie kan nie die helfte van die insetfrekwensie oorskry nie, dus word dit oor die algemeen slegs in stelsels met lae spoed en hoë kapasiteit gebruik, en kan die behoefte aan 'n groot ratverminderaar uitskakel.
AC-DC-omskakelaar sal eers die AC-krag in DC regstel, en dit dan in AC verander met beheerbare frekwensie en spanning deur omskakelaar, met PWM-tegnologie kan hierdie soort omskakelaar 'n wye reeks veranderlike spanning en frekwensie realiseer.
Vir elektriese voertuie is die asinchroniese motor duursaam, sterk oorlaaivermoë, en die beheeralgoritme is so volwasse dat dit heeltemal gebruik kan word.
6. Driefase-wisselstroommotor - spoedregulering van sinchrone motor
Sinchroniese motorspoedregulering:
Sinchroniese masjiene het geen afslaantempo nie, en die beheerspanning kan nie die spoed verander wanneer die struktuur bepaal word nie, so voor die verskyning van frekwensie-omsetters was sinchrone motors heeltemal ongereguleerd.
Die voorkoms van frekwensie-omskakelaar maak dat die AC-sinchrone motor ook 'n groot spoedreguleringsreeks het, want sy rotor het ook onafhanklike opwekking (permanente magneet of elektriese opwekking), sy spoedreguleringsreeks is wyer as dié van asinchrone motor, en die sinchrone motor het 'n nuwe lewe gekry.
Sinchroniese motor veranderlike spanning veranderlike frekwensie spoed beheer stelsel kan verdeel word in ander-beheerde veranderlike spoed beheer en selfbeheerde veranderlike spoed beheer.
Vir ander-beheerde veranderlike frekwensie spoed regulering, is dit soortgelyk aan die veranderlike frekwensie regulering van asinchrone motor, wat beheer kan word deur SVPWM en ander beheer metodes volgens sy wiskundige model, en sy werkverrigting is beter as dié van gewone AC asinchrone motor.
Selfbeheerde sinchroniese omskakelmotor het vroeër 'n verskeidenheid name in die ontwikkelingsproses gehad, soos kommutatorlose motor; wanneer permanente magnete gebruik word en driefase-sinusgolf ingevoer word, kan dit sinchrone sinchrone motor van permanente magneet sinus genoem word; en as vierkantgolf ingevoer word, dan kan dit trapesiumgolf permanente magneet sinchrone motor genoem word, ja, dit is soortgelyk aan die voorheen genoemde borsellose GS masjien (BLDM), ons voel nie dat 'n groot sirkel van rap gedraai het nie. Gaan terug, maar jy moet nou 'n dieper begrip hê van veranderlike spoed, dus borsellose GS-motor wanneer GS-invoer gebruik word, maar dieselfde struktuur as die sinchrone-magneetmotor frekwensie-model, op die gebruik van DC-borsellose motor.
7. Enkelfase AC asinchrone motor - enkelfase AC reeks opgewonde motor (kwas)
Enkelfase AC-reeks-opgewekte motor, algemeen bekend as serie-opgewekte motor of universele motor (UniversalMotor vreemde naam, genoem as gevolg van AC en DC universele), die anker wikkeling en opwekking wikkeling is in serie gekoppel om saam te werk.
Enkelfase-reeks-opgewonde motor word ook AC-DC-dubbelgebruik-reeks-opgewonde motor genoem, wat met óf WS-krag óf GS-krag kan werk.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
Die voordele van enkelfase-reeks-opgewonde motor is dat dit 'n hoë spoed, hoë aanvangswringkrag, klein grootte, ligte gewig het, nie maklik om rotasie te blokkeer nie, 'n wye reeks toepaslike spanning, en kan spoedgereguleer word deur die metode van spanningregulering, wat eenvoudig en maklik om te realiseer.
Daarom word dit wyd gebruik in elektriese gereedskap, soos hoekslyper, handboor, ens.
Die struktuur van enkelfase-reeks-opgewekte motor is baie soortgelyk aan dié van GS-reeks-opgewonde motor, die belangrikste verskil is dat die statorkern van enkelfase-reeks-opgewekte motor gemaak moet word van silikonstaal wat gelamineer is, terwyl die magnetiese pole van GS van beide gelamineerde en integrale struktuur gemaak kan word.
Enkelfase-reeks-opgewonde motorspoedregulering, die meeste van die metodes wat gebruik word om die spanning aan te pas, is om die elektriese potensiaal te verander.
Die spanningsreguleringsmetode van enkelfase-reeks-opgewekte motor gebruik beheerde faseverskuiwingspanningsregulering, wat die snellerspanning van die SCR gebruik om agter die insetspanning te bly om die faseverskuiwingsneller van die insetspanning te bereik.
Daar is hardeware en sagteware metodes in die implementering.
Die gereguleerde spanning metode, met behulp van silikon beheerde spoed beheer tegnologie, het 'n eenvoudige lyn, klein grootte van komponente en ander kenmerke van 'n silikon beheerde eenvoudige en effektiewe metode
(a) WS-stroomvariasiekromme;
(b) Rotasierigting van die rotor wanneer die stroom positiewe halfgolf is
(c) Rotasierigting van die rotor wanneer die stroom negatief halfgolf is
8. Enkelfase AC asinchroniese motor - enkelfase AC eekhoringhokmotor (borselloos)
Enkelfasestroom deur die ankerwikkeling produseer 'n pulserende magneetveld eerder as 'n roterende magneetveld, dus kan enkelfase asinchrone motors nie self aangeskakel word nie.
Om die aansitprobleem op te los, word enkelfase WS-aangedrewe asinchrone motors dikwels eintlik tweefase gemaak.
Die hoofwikkeling word direk deur die enkelfase kragtoevoer aangedryf; die sekondêre wikkeling is ruimtelik verskillend van die hoofwikkeling met 90° (elektriese hoek, gelyk aan die meganiese hoek gedeel deur die aantal motorpoolpare).
Die sekondêre wikkeling word gekoppel aan enkelfase-wisselstroomkragtoevoer na serieverbinding van kapasitor of weerstand, sodat die stroom wat daardeur gaan en die stroom in die hoofwikkeling 'n sekere faseverskil het.
Dit maak die sintetiese magneetveld 'n elliptiese roterende veld, of dalk selfs naby aan 'n sirkelvormige roterende veld.
Die motor verkry dus aansitwringkrag.
Die motor wat weerstandsfaseskeidingsmetode gebruik, is goedkoop, byvoorbeeld, die sekondêre wikkeling kan met 'n dunner draad gewikkel word, maar die faseskeidingseffek is swak en energie word in die weerstand verbruik.
Nadat die motor begin en 'n sekere spoed bereik, word die sekondêre wikkeling gewoonlik outomaties verwyder deur 'n sentrifugale skakelaar wat op die motoras gemonteer is om die weerstandsverliese te verminder en die bedryfsdoeltreffendheid te verbeter.
Dit word oor die algemeen gebruik vir die geleentheid dat die aanvangswringkragvereiste nie hoog is nie, soos klein draaibank, klein yskas, ens. Die nadeel is dat die spoed nie verstel kan word nie.
Dit is moontlik om die sintetiese magnetiese veld van die motor naby die sirkelvormige roterende magneetveld by 'n sekere werkspunt van die motor te maak, om sodoende beter werkeienskappe te verkry.
Om die gesplete-fase asinchroniese motor beter aansitwerkverrigting of beter bedryfseienskappe of albei te laat verkry, is die kapasitansie (hoeveelheid waarde) wat benodig word anders en kan dit in drie soorte verdeel word
9. stepper motors - oop-lus stepper motors
(Ooplus) stapmotors is ooplus beheerde motors wat elektriese pulsseine omskakel in hoekverplasings, en word uiters wyd gebruik.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
Die aantal pulse kan beheer word om die hoeveelheid hoekverplasing te beheer, om sodoende die doel van akkurate posisionering te bereik; terselfdertyd kan die polsfrekwensie beheer word om die spoed en versnelling van motorrotasie te beheer, om sodoende die doel van spoedregulering te bereik.
Stapmotor is 'n soort induksiemotor wat werk deur 'n elektroniese stroombaan, dit wil sê 'n drywer, te gebruik om GS-krag te omskep in 'n tyddeelaangedrewe multi-fase tydsberekening beheerstroom.
Alhoewel stapmotors deur GS-stroom aangedryf word, kan hulle nie as GS-motore verstaan word nie, wat kragmotors is wat GS elektriese energie omskakel in meganiese energie, terwyl stapmotors ooplusbeheermotors is wat elektriese pulsseine in hoekverplasing omskakel.
10. Stapmotor - stepper servo vergelyking
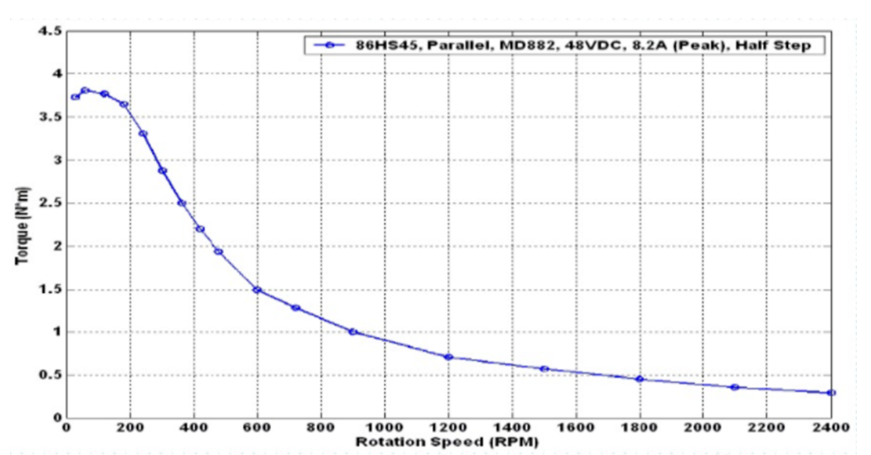
Let daarop dat stapmotors in laespoedtoepassings gebruik word - nie meer as 1000r/min per minuut nie, die beste werkbereik is 150~500r/min, (geslote-lus verhoog tot 1500).
2-fase stepper motor by 60 ~ 70r/min is geneig tot lae spoed resonansie verskynsel, genereer vibrasie en geraas, wat vermy moet word deur die reduksie verhouding te verander, die fyn fraksie te verhoog, magnetiese dempers by te voeg, ens.
Onderverdeling akkuraatheid voorsorgmaatreëls, wanneer die onderverdelingsvlak groter as 4 is, kan die akkuraatheid van die staphoek nie gewaarborg word nie, hoë presisievereistes, dit is die beste om oor te skakel na meer fases (d.w.s. kleiner staphoek) van die stapmotor of geslote-lus stepper, servomotor.
(Ooplus) stapmotor en servomotor 7 verskillende.
A beheer akkuraatheid - servo motor beheer akkuraatheid kan ingestel word volgens die enkodeerder, hoër akkuraatheid.
B lae-frekwensie-eienskappe - stapmotors is geneig tot vibrasie by lae frekwensies, servomotors nie.
C moment-frekwensie-eienskappe - trapmotor-wringkrag word kleiner met die toename in spoed, dus is die maksimum bedryfspoed gewoonlik in <1000r/min, servomotor in die nominale spoed (gewoonlik 3000r/min) kan die nominale wringkrag lewer, in die nominale spoed bo die konstante kraglewering, die maksimum spoed van tot 5000 r/min;.
D oorlaai kapasiteit - stapmotor kan nie oorlaai word nie, servo motor maksimum wringkrag kan 3 keer oorlaai word.
E bedryfsverrigting - stapmotor vir ooplusbeheer, servomotor wanneer geslotelusbeheer.
F-spoedreaksie - stapmotor aanskakeltyd 0.15 ~ 0.5s, servomotor 0.05 ~ 0.1, die vinnigste 0.01s om die gegradeerde 3000r / min te bereik.
G doeltreffendheid aanwysers - stapmotor doeltreffendheid van ongeveer 60%, servo motor ongeveer 80%.
In die werklike gebruik sal vind: servo motor duur, duur uit baie, so sinchroniese motors word meer algemeen gebruik, veral in die posisionering akkuraatheid vereistes is nie baie hoë sinchroniese band ry, plat band vervoerband en ander geleenthede dikwels gebruik stepper motor.
11. Stapmotors - geslote-lus stapmotors
Geslote-lus-stapmotors: Benewens ooplus-stapmotors, is daar stapmotors wat 'n enkodeerder aan die einde van die motor het, wat geslote-lusbeheer moontlik maak.
Geslote-lusbeheer van stapmotors gebruik posisieterugvoer en/of snelheidterugvoer om fase-oorgange te bepaal wat geskik is vir die rotorposisie, wat die werkverrigting van stapmotors aansienlik kan verbeter.
Servo-stelsels sonder uit-stap-verskynsels.
Voordele van geslote-lus stapmotors.
1. Hoëspoed reaksie. In vergelyking met geskikte motors, het geslotelus-stepper baie sterk navolging van posisioneringsopdragte, so die posisioneringstyd is baie kort. In die toepassing van gereelde begin/stop kan die posisioneringstyd aansienlik verkort word.
2. Genereer meer wringkrag as gewone servo. Maak op vir die gebrek aan trapverlies en laespoedvibrasie van gewone stepperstelsel.
3. Hoë wringkrag kan selfs onder 100% las gegenereer word, sonder verlies van trapwerking, sonder om wringkragverlies en ander probleme soos gewone trapstelsels in ag te neem.
4. Deur die toelusaandrywing toe te pas, kan die doeltreffendheid tot 7,8 keer verhoog word, die uitsetkrag kan tot 3,3 keer verhoog word, en die spoed kan tot 3,6 keer verhoog word.
Dit kan hoër hardloopspoed, stabieler en gladder spoed kry as ooplusbeheer.
5. Die stapmotor sal heeltemal stilstaan wanneer dit stop, sonder die mikro-vibrasie-verskynsel van gewone servo.
Dit kan die toepassing van algemene-doel servo-stelsel vervang wanneer lae koste en hoë presisie posisionering vereis word.
12. stepper motor - stepper geslote-lus servo vergelyking
Geslote-lus-stapmotors pas outomaties die wikkelstroomgrootte aan volgens die grootte van die las, hitte en vibrasie is minder as ooplus-stepper, daar is enkodeerderterugvoer, sodat die akkuraatheid hoër is as gewone steppermotors, motorreaksie as ooplus-stepper vinniger as servomotors, daar is 'n posisiefout tydens werking, die fout sal geleidelik afneem na die opdrag in millisekondes.
Hoë-spoed wringkrag as ooplus stepper, algemene toepassings in die 0-1500rpm geleentheid.
Samevattend: geslote-lus stepper motor met lae koste, hoë doeltreffendheid, geen jitter, geen stop mikro-vibrasie, hoë rigiditeit, geen regstelling, hoë spoed, hoë dinamiese reaksie, ens., is die vervanging van hoëkoste servostelsels, lae-end ooplus stepper stelsels en ander koste-effektiewe oplossings
13. Servomotor - Algemene servomotor
Servomotor (servomotor), ook bekend as aktuatormotor, kan die beheerspoed, posisieakkuraatheid baie akkuraat maak, kan die spanningsein omskakel in wringkrag en spoed om die beheervoorwerp aan te dryf.
Anders as die hoofstruktuur van die stapmotor, is servomotor 'n standaard GS-motor of AC-induksiemotor omdat die beheerkring buite die motor geplaas word en die motordeel binne.
Die servomotor maak staat op pulse vir posisionering. Wanneer die servomotor 1 puls ontvang, draai dit met 'n hoek wat ooreenstem met 1 puls.
Elke keer as die motor 'n hoek draai, sal die enkodeerder die ooreenstemmende aantal terugvoerpulse uitstuur. Die terugvoerpulse en die pulse wat deur die servodrywer ontvang word, vorm 'n geslote lusbeheer, sodat die servodrywer die rotasie van die motor baie presies kan beheer om presiese posisionering te verkry.
Servomotorbeheer: Oor die algemeen word servomotors vir industriële gebruik deur drie lusse beheer, naamlik stroomlus, spoedlus en posisielus, wat onderskeidelik die hoekversnelling, hoekspoed en rotasieposisie van die motorwerking kan terugvoer.
Die skyfie beheer die dryfstroom van elke fase van die motor deur die terugvoer van die drie, sodat die spoed en posisie van die motor akkuraat kan loop soos geskeduleer.
AC servo het die kenmerk van konstante wringkrag onder gegradeerde spoed, algemene 200W, 400W lae en medium traagheid AC servo gegradeerde spoed is 3000rpm, die hoogste spoed is 5000rpm, hoë spoed.
Die wringkrag is eweredig aan die stroom, so dit kan in die wringkragmodus werk, soos sluitskroewe, drukklemme en ander geleenthede wat konstante wringkrag benodig.
AC servo werk geraas en vibrasie is baie klein, lae hitte generasie.
Dieselfde volume motortraagheid rotor traagheid is klein, 400W servo traagheid is slegs gelykstaande aan die rotor traagheid van 57 basis 2NM stepper motor.
Servo het 'n kort tyd oorlaai kapasiteit, die keuse moet die motor oorlading vermenigvuldiger in ag neem wanneer versnelling en vertraging.
Die servo gebruik geslote-lus-beheer en het dieselfde posisie-volgfout as 'n geslote-lus-stepper.
Servo vereis ingebruikneming voor gebruik.
Die oorspronklike wringkrag van die stepper en servomotor is nie genoeg nie, moet dikwels met die verkleiner werk, jy kan die reduksieratstel of planetêre verkleiner gebruik.
6. Servomotor - servo
Servo is 'n klas GS servomotors, wat eers vir klein vliegtuigmodelle gebruik is en nou vir klein robotverbindings gebruik word.
Uit die strukturele ontleding bestaan 'n servo uit 'n klein GS-motor, plus sensors, beheerskyfies en reduksieratstelle, wat in 'n geïntegreerde behuising gemonteer is.
Dit is in staat om die rotasiehoek te beheer deur 'n insetsein (gewoonlik 'n PWM-sein, maar ook 'n digitale sein).
Aangesien dit 'n vereenvoudigde weergawe is, word die oorspronklike drielusbeheer van die servomotor vereenvoudig tot een lus, dit wil sê net die posisielus word opgespoor.
'n Goedkoop oplossing is 'n potensiometer, wat deur 'n weerstand opgespoor word, terwyl 'n gevorderde oplossing 'n Hall-sensor, of 'n enkodeerder, sal gebruik.
Algemene servo's is goedkoop en kompak, maar het 'n baie lae akkuraatheid en swak posisie-kalmerende vermoë, en kan aan baie lae-end behoeftes voldoen.
Met die oplewing van klein robotte van verbruikersgraad in die afgelope twee jaar, het klein en liggewig servo's onmiddellik die mees geskikte gewrigskomponente geword.
Robotgewrigte vereis egter baie hoër werkverrigting as lugservos, en as 'n kommersiële produk vereis dit ook baie hoër kwaliteit servo's as selfdoenspelers.
Welkom om meer inligting oor elektriese motors in die kommentaararea met ons te deel!
Kontak die professionele elektriese motor enige ondersoek na elektriese motor vervaardiger in Sjina soos volg:
 Slaan na inhoud
Slaan na inhoud